很久没有更新Blog,这仍旧是一篇凑数性质的文章。等空下来了会写一些具体和系统的东西。
这是我和其他朋友在业余从事的一个项目,代号为RoboPeak。可能之前一些发出的一些视频中已经有所透露,这里就算是非正式的正式介绍吧。因为这是篇凑数文,所以具体细节就不介绍了。
这是最近做出的一个低成本的激光测距系统,以及基于这个测距仪做的平面障碍物雷达图。用的是简单的三角测距原理。不过精确度在经过了校正后可以做到很小(0-7米范围内<10cm),对于室内应用有一定的实用价值。
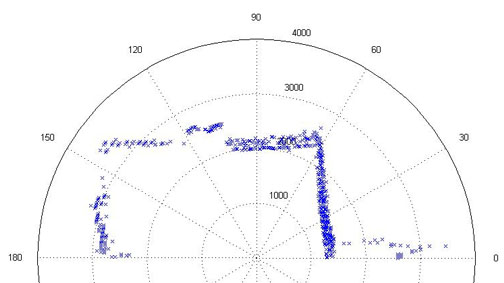
所谓雷达,就是以自身为中心的平面内,将一定角度范围内的物体距离自身的距离求出,并在极坐标下作图。这里得到的是自身前方-90度至90度范围的扫描图。用途嘛自然有很多。如果对这个原理感兴趣,可以等以后某个时间我有空了可能会做介绍。
1. 演示视频#1
2. 演示视频#2
3. 演示视频#3
4. 实际布局

5. 雷达图#1
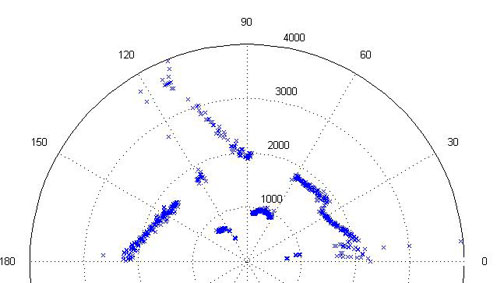
6. 雷达图#2