请点击文章标题阅读全文
本文最早发表于ifanr:http://www.ifanr.com/388835
本文最早发表于ifanr:http://www.ifanr.com/388835
转载请保留作者信息和原始出处:CSK.Blog
1. 前言
在今年(2013)罗马举办的首届欧洲 Make Faire 上,Intel 向对外发布了采用 x86 构架的 Arduino 开发板:Intel Galileo。这无疑是一个开源硬件领域的重磅消息。作为 CPU 领域的巨头 Intel, 为开源硬件/Maker 领域这个从前相对小众的圈子推出专门的硬件,无疑说明对开源硬件领 域发展的重视程度。同时,Intel 也作为本届欧洲 Maker Faire 的主要赞助商。
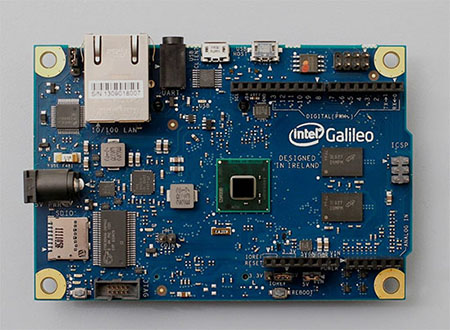
图:Intel Galileo 开发板,图片来自 intel.com
在 PC 行业,Intel x86 构架的强大性能一直被行业称道,自然这次推出的 Arduino 开发板,也 给业界带来了无限的遐想。我相信很多人都会略带调侃问:这个开发板能不能运行 Windows 这样的问题。同时,相信也有不少人会关心 Intel Galileo 的功耗问题,以及开发使用上是否具有难度。
作为曾在 Intel 工作过的作者,对老东家能够推出针对开源硬件市场的产品感到欣慰。通过 朋友,我也有幸在较早时间拿到了一块 Intel Galileo。经过了一段时间的使用和体验,这里 我就将我们对 Intel Galileo 的一些使用体验向大家分享。并且作为开源硬件和机器人开发的 从业人员,聊聊 Intel Galileo 到底可以给我们带来哪些想象空间? 这里也先针对那个调侃问题做个回应:是的,通过软件的调整,Intel Galileo 的确可以运行 Windows:)

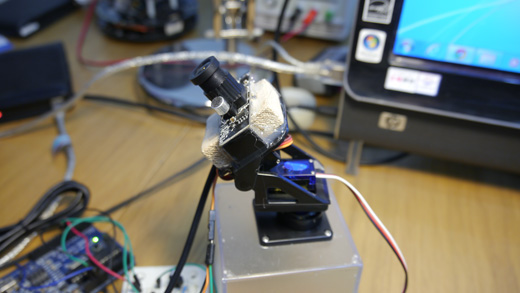
图:使用 RoboPeak 微型 USB 显示屏,给 Galileo 增加显示屏变成标准 PC