这是一个文章系列的一部分,介绍基于MK802这类MiniPC的扩展开发,并展示他在计算机视觉、机器人控制方面的潜能
欢迎转载,但请保留原始作者信息(Shikai Chen, http://www.csksoft.net),以及指向本文原始出处的链接!
访问目录:基于MK802 MiniPC的扩展开发应用-简介篇(http://www.csksoft.net/blog/post/mk802_dev_intro.html)
revision: 0
这是本系列文章的最后一篇了。本文将以如下几个基于MK802的应用实例进行介绍,向大家展示MK802在机器人控制以及计算机视觉方面的应用潜力。
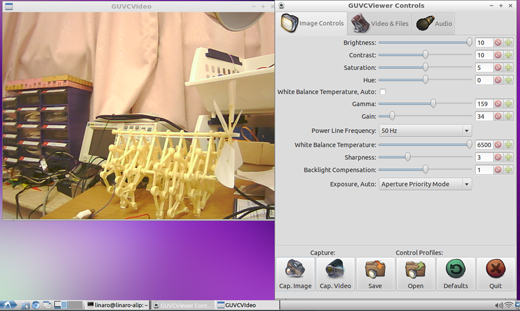
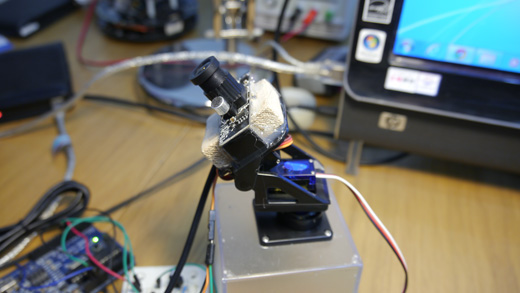
1. 基于MK802的摄像头自动光源跟踪
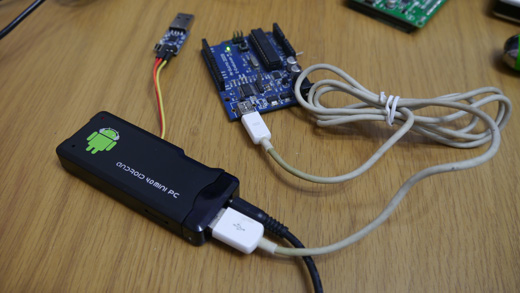
2. 基于MK802的人脸摄像机云台跟踪
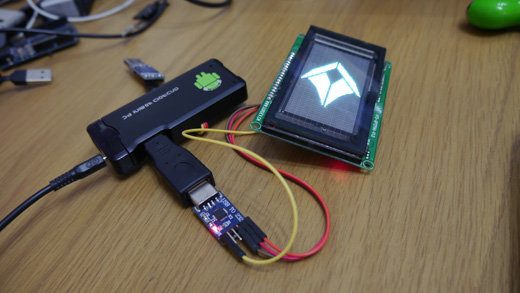
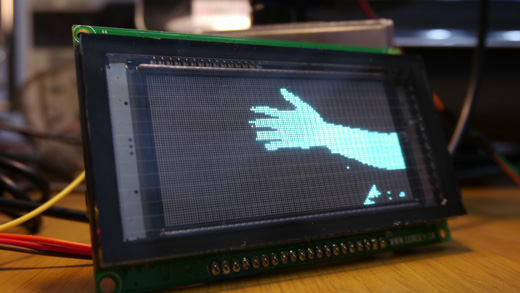
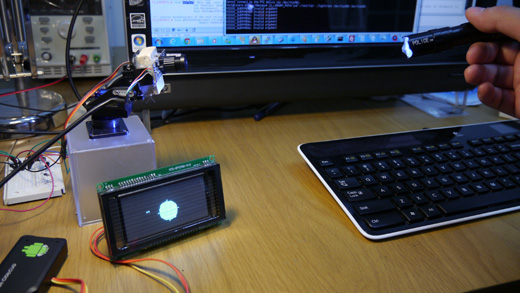
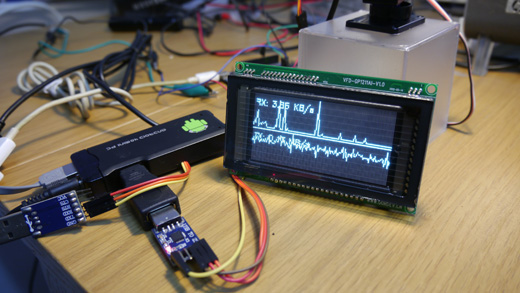
3. MK802将路由器网络通讯情况显示与VFD屏幕
这些是例子基于了我前5篇文章[1][2][3][4][5]所介绍的各类技巧和环境所形成的,这里我就假设大家已经阅读过先前的文章了,这里将以介绍思路和原理的方式来介绍这些实例。如果想进一步了解他们的实现,可以在本系列文章在github开设的项目中查看他们的源代码,在前一篇文章[5]中我也介绍了如何编译他们的。
Demo applications run on MK802 MiniPC to show MK802 potential in OpenCV and arduino related areas
另外之前也有一些朋友表示这些实例使用的算法并不高级,性能也不佳。这里我就做一个统一的回应,本系列文章介绍的这些实例的目的并不是去实现这些功能本身,这些实例目前的确存在更好地实现。我制作这些实例的目的是为了向大家介绍MK802用于机器人控制和计算机视觉算法处理方面的强大潜能,因此我都尽可能使用了被大家熟知或者存在于OpenCV例子当中的程序作为范本。至于如何将这些例子进行改进扩充,就是靠大家发扬光大了:-)。
另外还有很多人会问这些例子能不能在树梅派、MK802的后续升级版本、XXXXX上面实现?这里我再次重复前几篇文章的说明,这里介绍的一切方法和思路对所有基于Linux的系统有效。当然,如果只是简单的复制这里的步骤,那恐怕只能用于MK802了。

点击文章标题浏览正文