最近买了一些GPS模块打算用在我们的机器人上,就顺便花了一个下午用一个蓝牙串口模块配合,做了一个可以给带蓝牙的智能机使用的蓝牙GPS。效果不错,就和大家分享下制作过程吧。

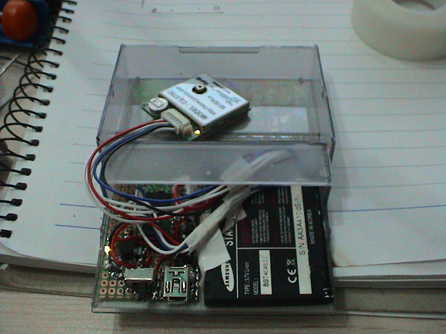
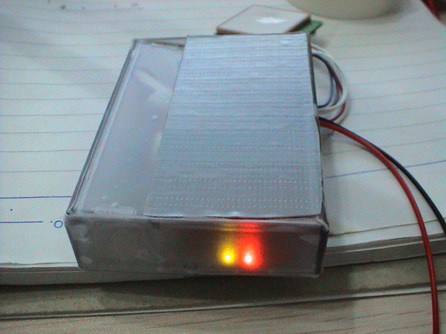
上图就是成品的外观,我使用了DVmini磁带壳作为这个GPS的外壳,样子有点山寨,不过平时使用是会放在包里的,问题不大。以下是这个制作所实现的功能和配置情况:
1. 基于SiRF III芯片的GPS模块
2. 蓝牙通讯功能
3. 900mAh锂电池,单次充电可达7小时工作时间
4. Mini-USB口充电
5. 低电压充电提醒
在介绍制作前先给出我的HTC S1连接他的效果吧:-)
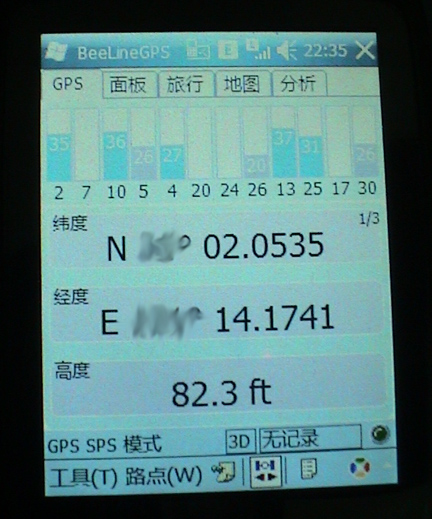
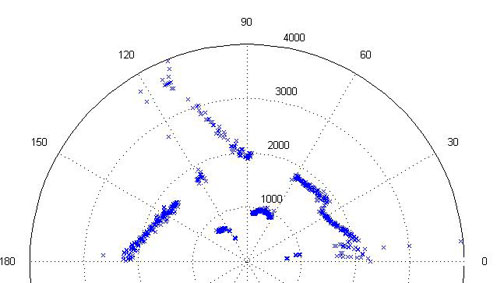
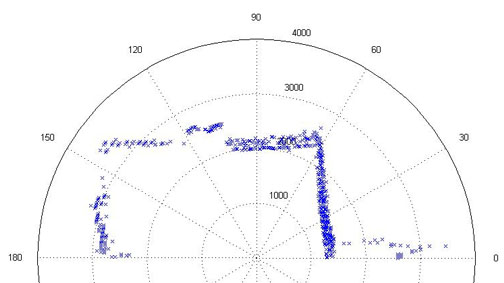
实际测试中,在室外环境下通电(冷启动)到完成3D定位仅需20秒不到的时间。性能很不错。
制作原理
目前GPS通讯协议有相关规范,一般都是通过串口进行数据发送的,市面上可以买到的GPS模块元件也基本都是直接串口输出。所以只要简单的和市面上可以找到的蓝牙转串口模块相连即可实现出一个蓝牙GPS设备了。
需要做的额外工作是如何给GPS和蓝牙供电、充电。一般蓝牙设备需要3.3V的稳压供电,所以要有LDO元件,这里要选择专供电池设备使用的低压差的LDO,我用的是PAM3101系列的LDO。
另外为了防止锂电池过放电导致报废,这里设计了一个低压提醒电路。我使用TL431基准源对当前电池电压比较,如果低于3.3V后,会点亮一个红色LED提醒该给电池充电了,如下图所示:
对于锂电池充电部分,这里仍旧使用了偷懒办法,从USB口取电后经过1N4148二极管的正向压降后大致可以得到4.2V左右的电压给锂电池充电,如果实际电压不幸高于了4.2V,就依靠电池内部的保护电路动作了... 这个是比较危险的设计,需要有人看守着进行充电。
电路原理图我就不介绍了,很简单,大家打开这个pdf看看即可:
http://www.csksoft.net/data/GPS_bluetooth.pdf
我尽可能的使用了贴片元件来制作,这样可以保证较小的尺寸好放进这个磁带盒中,虽然焊的比较费时:-) 下面是制作过程中拍摄的几张照片给大家参考
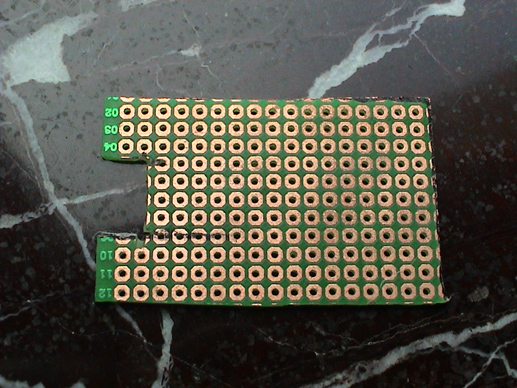
万用版上挖出凹槽部分放置蓝牙模块的天线
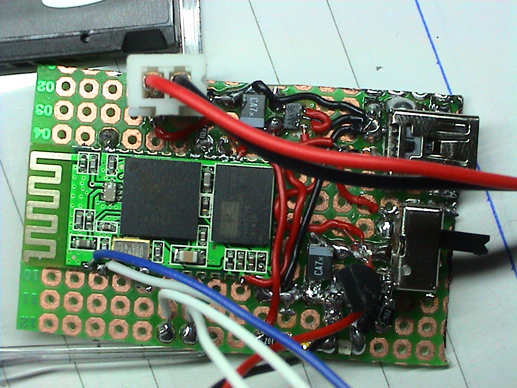
成品电路
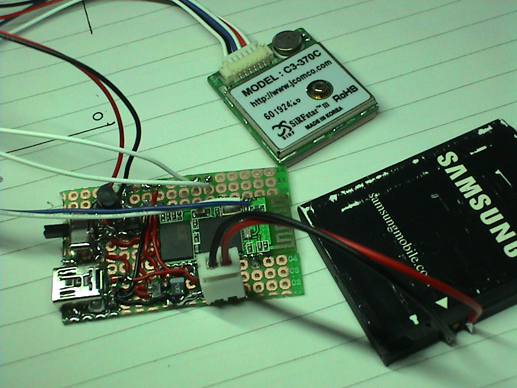
所有组件连接就绪