这是一个文章系列的一部分,介绍基于MK802这类MiniPC的扩展开发,并展示他在计算机视觉、机器人控制方面的潜能
欢迎转载,但请保留原始作者信息(Shikai Chen, http://www.csksoft.net),以及指向本文原始出处的链接!
访问目录:基于MK802 MiniPC的扩展开发应用-简介篇(http://www.csksoft.net/blog/post/mk802_dev_intro.html)
revision: 2
通过了前几篇文章[1][2][3]的介绍,相信大家已经为MK802准备好了适合的自制系统也了解了应用开发的基本过程。从这篇文章开始我们将正式介绍本系列文章的最终目的:使用MK802与Arduino等外部硬件通讯,制作各类应用。
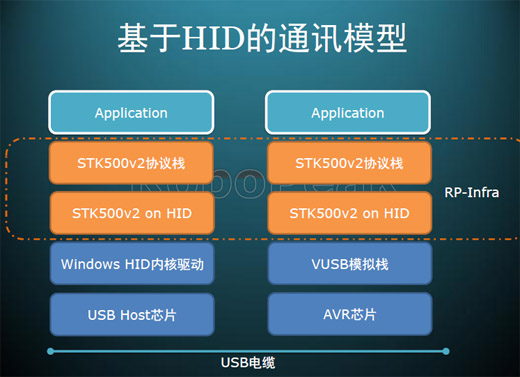
这篇文章将介绍其中的一个重要步骤:如何实现MK802与外部硬件设备的通讯。这是后续进一步开发的必要环节。

图:利用MK802的2个usb口连接usb外设
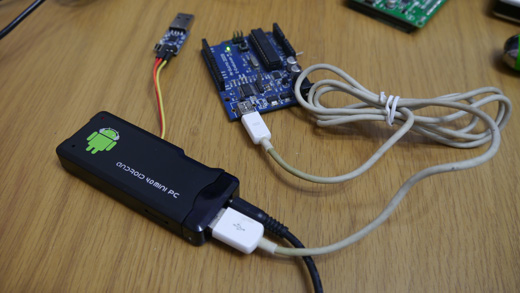
图:直接将MK802和Arduino相连
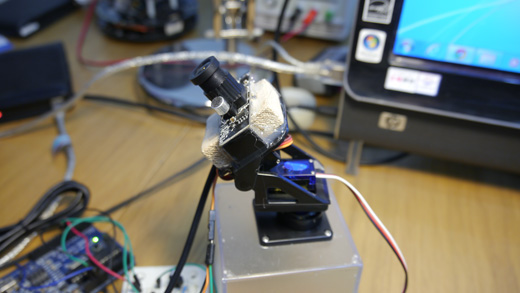
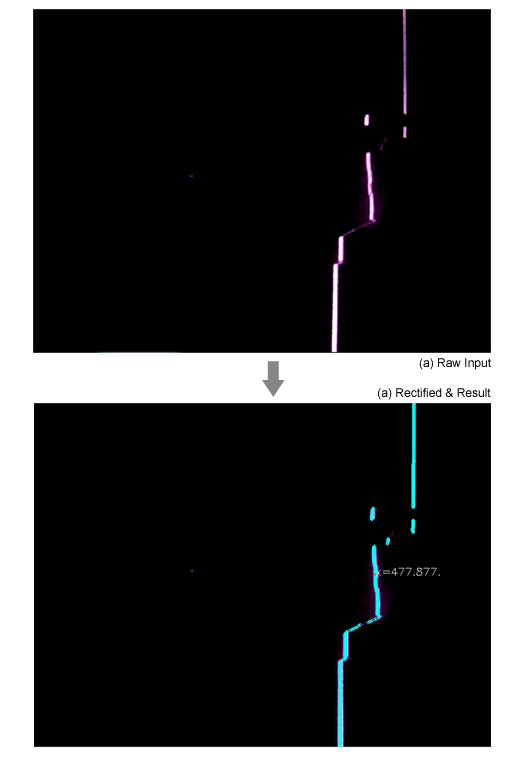
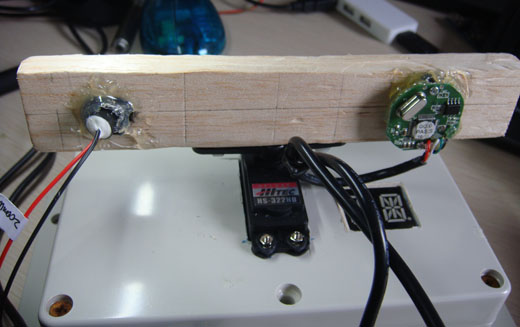
图:在自制舵机云台上安装的USB摄像头(将在后续文章介绍)
点击文章标题浏览全文































.jpg)