放出一段演示我们机器人基本功能的演示视频,具体介绍就不提供了。视频内有必要的说明。
视频仅展示了手动控制机器人的相关功能,而真正强大的部分还没有太多展示。
视频地址:http://www.tudou.com/programs/view/mZcWNvUj6NM/
放出一段演示我们机器人基本功能的演示视频,具体介绍就不提供了。视频内有必要的说明。
视频仅展示了手动控制机器人的相关功能,而真正强大的部分还没有太多展示。
视频地址:http://www.tudou.com/programs/view/mZcWNvUj6NM/
业余时间和朋友们做了一年多的机器人项目,RoboPeak Project。快要接近第一次公开发布了~
很好很强大。我Blog将在正式发布后做更多详细介绍,敬请期待:-) 这里也感谢各位忙里抽空的朋友们,大家辛苦啦。
最近买了一些GPS模块打算用在我们的机器人上,就顺便花了一个下午用一个蓝牙串口模块配合,做了一个可以给带蓝牙的智能机使用的蓝牙GPS。效果不错,就和大家分享下制作过程吧。

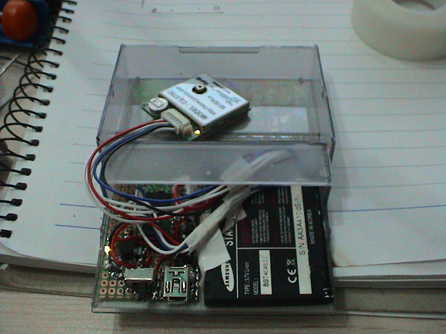
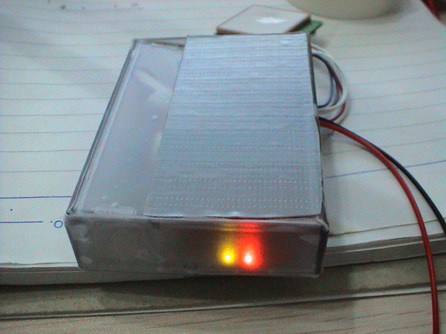
上图就是成品的外观,我使用了DVmini磁带壳作为这个GPS的外壳,样子有点山寨,不过平时使用是会放在包里的,问题不大。以下是这个制作所实现的功能和配置情况:
1. 基于SiRF III芯片的GPS模块
2. 蓝牙通讯功能
3. 900mAh锂电池,单次充电可达7小时工作时间
4. Mini-USB口充电
5. 低电压充电提醒
在介绍制作前先给出我的HTC S1连接他的效果吧:-)
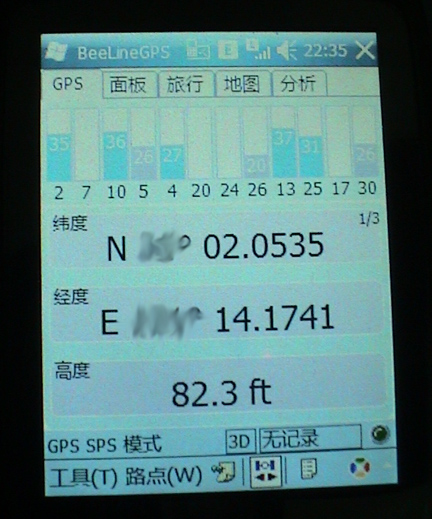
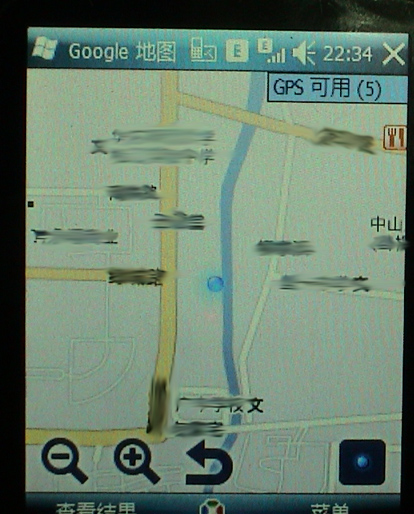
实际测试中,在室外环境下通电(冷启动)到完成3D定位仅需20秒不到的时间。性能很不错。
目前GPS通讯协议有相关规范,一般都是通过串口进行数据发送的,市面上可以买到的GPS模块元件也基本都是直接串口输出。所以只要简单的和市面上可以找到的蓝牙转串口模块相连即可实现出一个蓝牙GPS设备了。
需要做的额外工作是如何给GPS和蓝牙供电、充电。一般蓝牙设备需要3.3V的稳压供电,所以要有LDO元件,这里要选择专供电池设备使用的低压差的LDO,我用的是PAM3101系列的LDO。
另外为了防止锂电池过放电导致报废,这里设计了一个低压提醒电路。我使用TL431基准源对当前电池电压比较,如果低于3.3V后,会点亮一个红色LED提醒该给电池充电了,如下图所示:
对于锂电池充电部分,这里仍旧使用了偷懒办法,从USB口取电后经过1N4148二极管的正向压降后大致可以得到4.2V左右的电压给锂电池充电,如果实际电压不幸高于了4.2V,就依靠电池内部的保护电路动作了... 这个是比较危险的设计,需要有人看守着进行充电。
电路原理图我就不介绍了,很简单,大家打开这个pdf看看即可:
http://www.csksoft.net/data/GPS_bluetooth.pdf
我尽可能的使用了贴片元件来制作,这样可以保证较小的尺寸好放进这个磁带盒中,虽然焊的比较费时:-) 下面是制作过程中拍摄的几张照片给大家参考
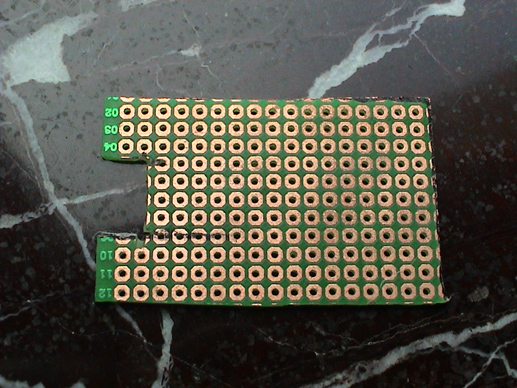
万用版上挖出凹槽部分放置蓝牙模块的天线
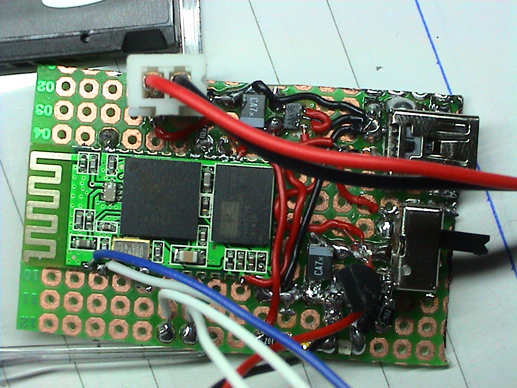
成品电路
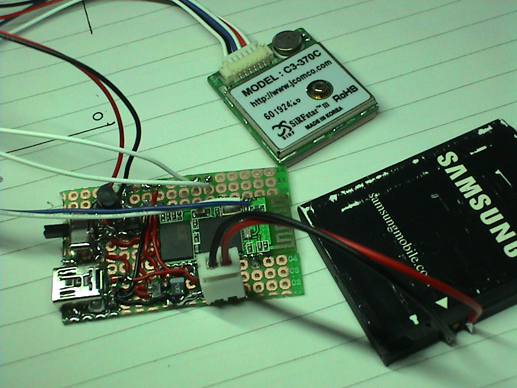
所有组件连接就绪

议程安排
2010年9月18日 星期六
会议地点
畅星大厦•上海
地址:上海浦东新区碧波路888号畅星大厦3楼会议厅
电话:021-38984558
网站:http://www.changxing.sh.cn
交通:地铁2号线张江站(步行5-10分钟即到),161

很久没有更新Blog,这仍旧是一篇凑数性质的文章。等空下来了会写一些具体和系统的东西。
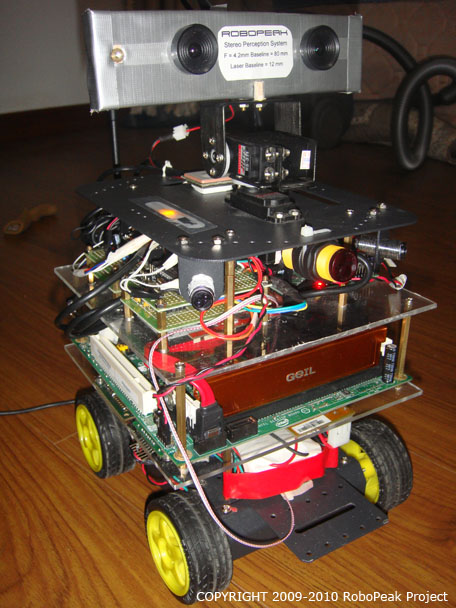
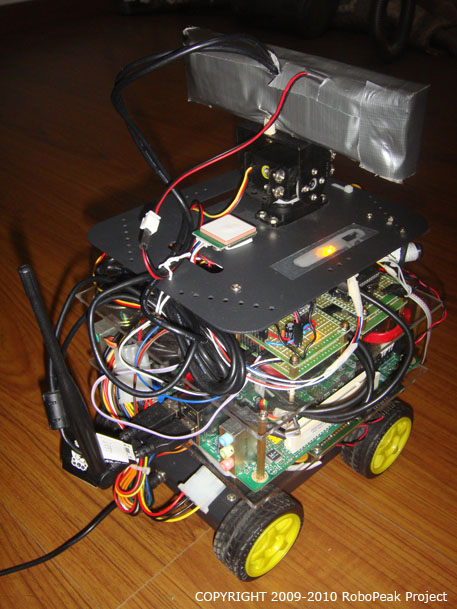
这是我和其他朋友在业余从事的一个项目,代号为RoboPeak。可能之前一些发出的一些视频中已经有所透露,这里就算是非正式的正式介绍吧。因为这是篇凑数文,所以具体细节就不介绍了。
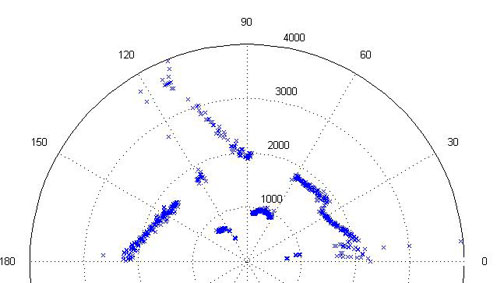
这是最近做出的一个低成本的激光测距系统,以及基于这个测距仪做的平面障碍物雷达图。用的是简单的三角测距原理。不过精确度在经过了校正后可以做到很小(0-7米范围内<10cm),对于室内应用有一定的实用价值。
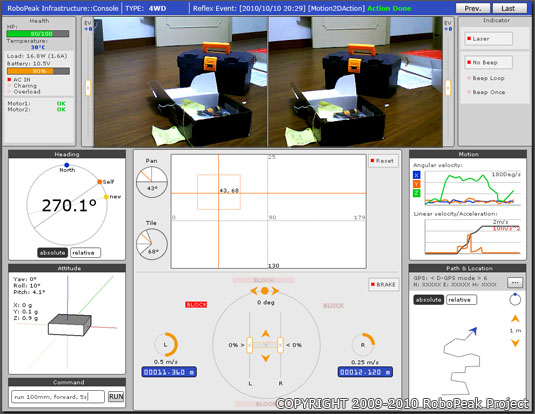
所谓雷达,就是以自身为中心的平面内,将一定角度范围内的物体距离自身的距离求出,并在极坐标下作图。这里得到的是自身前方-90度至90度范围的扫描图。用途嘛自然有很多。如果对这个原理感兴趣,可以等以后某个时间我有空了可能会做介绍。
1. 演示视频#1
2. 演示视频#2
3. 演示视频#3
4. 实际布局

5. 雷达图#1
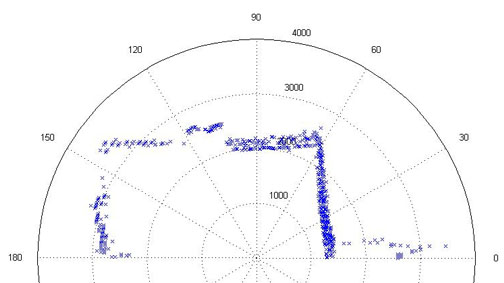
6. 雷达图#2
这里再次感谢活动主办方提供这样一个机会供大家交流,气氛和条件都很不错。
这是我于5.30号在第三次中国Flash开发者交流会(swfsh.com)活动上做的一个专题介绍。题目为《AVM2虚拟机与ActionScript3性能分析》。这里把当时的讲稿和实例代码放出供大家分享。另外主办方网站也有当时我演讲的录像(http://events.swfsh.com/2010-5-30-04/ (原链接实效,视频可通过下面地址访问: Part1 Part2),可以过去看看:-)
其实从工作后我好久没有使用Flash写过东西了。以前也专注在AS1/2的使用。而这次介绍的是Flash9开始引入的AS3语言所使用的虚拟机AVM2的分析,以及对ActionScript3.0开发优化方面的一些启发,以及演示了一个我自己扩充的第三方AVM2虚拟机实现ActionScript3对OpenGL和Fmod的调用。
可能PPT和视频中存在错误,希望大家多多包涵~ 不废话了,下面是PPT的在线预览以及下载地址。
PPT:
PPT Pdf地址:
http://www.csksoft.net/data/avm2_as3_intro_shikai_chen.pdf
演示代码:
http://www.csksoft.net/data/avm2_intro_samplecode.zip
其中,对Red-Tamarin的修改我用patch形式提供。
算是凑数文章,原本不想发了,不过还是贴出来给各位看看吧。但不解释...
下回不掉各位胃口了,写点实在的东西,只要时间允许:-)
